mirror of
https://github.com/LCTT/TranslateProject.git
synced 2025-03-27 02:30:10 +08:00
PRF
@wenwensnow
This commit is contained in:
parent
a913f395cc
commit
2c08f8d273
@ -1,46 +1,40 @@
|
||||
Go语言在极小硬件上的运用(第一部分)
|
||||
============================================================
|
||||
Go 语言在极小硬件上的运用(一)
|
||||
=========
|
||||
|
||||
|
||||
_Go_ 语言,能在多低下的配置上运行并发挥作用呢?
|
||||
Go 语言,能在多低下的配置上运行并发挥作用呢?
|
||||
|
||||
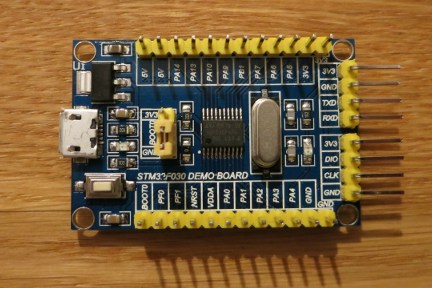
我最近购买了一个特别便宜的开发板:
|
||||
|
||||
[][2]
|
||||
|
||||
我购买它的理由有三个。首先,我(作为程序员)从未接触过STM320系列的开发板。其次, STM32F10x系列使用频率也在降低。STM320系列的MCU很便宜,有更新的外设,对系列产品进行了改进,问题修复也做得更好了。最后,为了这篇文章,我选用了这一系列中最低配置的开发板,整件事情就变得有趣起来了。
|
||||

|
||||
|
||||
我购买它的理由有三个。首先,我(作为程序员)从未接触过 STM320 系列的开发板。其次,STM32F10x 系列使用也有点少了。STM320 系列的 MCU 很便宜,有更新一些的外设,对系列产品进行了改进,问题修复也做得更好了。最后,为了这篇文章,我选用了这一系列中最低配置的开发板,整件事情就变得有趣起来了。
|
||||
|
||||
### 硬件部分
|
||||
|
||||
[STM32F030F4P6][3] 给人留下了很深的印象:
|
||||
|
||||
* CPU: [Cortex M0][1] 48 MHz (最低配置,只有12000个逻辑门电路),
|
||||
* CPU: [Cortex M0][1] 48 MHz(最低配置,只有 12000 个逻辑门电路)
|
||||
* RAM: 4 KB,
|
||||
* Flash: 16 KB,
|
||||
* ADC、SPI、I2C、USART 和几个定时器
|
||||
|
||||
* RAM: 4 KB,
|
||||
|
||||
* Flash: 16 KB,
|
||||
|
||||
* ADC, SPI, I2C, USART 和几个定时器,
|
||||
|
||||
以上这些采用了TSSOP20封装。正如你所见,这是一个很小的32位系统。
|
||||
以上这些采用了 TSSOP20 封装。正如你所见,这是一个很小的 32 位系统。
|
||||
|
||||
### 软件部分
|
||||
|
||||
如果你想知道如何在这块开发板上使用 [Go][4] 编程,你需要反复阅读硬件手册。真实情况是:有人在Go 编译器中给Cortex-M0提供支持,可能性很小。而且,这还仅仅只是第一个要解决的问题。
|
||||
如果你想知道如何在这块开发板上使用 [Go][4] 编程,你需要反复阅读硬件规范手册。你必须面对这样的真实情况:在 Go 编译器中给 Cortex-M0 提供支持的可能性很小。而且,这还仅仅只是第一个要解决的问题。
|
||||
|
||||
我会使用[Emgo][5],但别担心,之后你会看到,它如何让Go在如此小的系统上尽可能发挥作用。
|
||||
我会使用 [Emgo][5],但别担心,之后你会看到,它如何让 Go 在如此小的系统上尽可能发挥作用。
|
||||
|
||||
在我拿到这块开发板之前,对 [stm32/hal][6] 系列下的F0 MCU 没有任何支持。在简单研究 [参考手册][7]后,我发现 STM32F0系列是STM32F3的一个基础,这让在新端口上开发的工作变得容易了一些。
|
||||
在我拿到这块开发板之前,对 [stm32/hal][6] 系列下的 F0 MCU 没有任何支持。在简单研究[参考手册][7]后,我发现 STM32F0 系列是 STM32F3 削减版,这让在新端口上开发的工作变得容易了一些。
|
||||
|
||||
如果你想接着本文的步骤做下去,需要先安装Emgo
|
||||
如果你想接着本文的步骤做下去,需要先安装 Emgo
|
||||
|
||||
```
|
||||
cd $HOME
|
||||
git clone https://github.com/ziutek/emgo/
|
||||
cd emgo/egc
|
||||
go install
|
||||
|
||||
```
|
||||
|
||||
然后设置一下环境变量
|
||||
@ -56,32 +50,29 @@ export EGPATH=$HOME/emgo/egpath
|
||||
export EGARCH=cortexm0
|
||||
export EGOS=noos
|
||||
export EGTARGET=f030x6
|
||||
|
||||
```
|
||||
|
||||
更详细的说明可以在 [Emgo][8]官网上找到。
|
||||
更详细的说明可以在 [Emgo][8] 官网上找到。
|
||||
|
||||
要确保 egc 在你的PATH 中。 你可以使用 `go build` 来代替 `go install`,然后把 egc 复制到你的 _$HOME/bin_ 或 _/usr/local/bin_ 中。
|
||||
要确保 `egc` 在你的 `PATH` 中。 你可以使用 `go build` 来代替 `go install`,然后把 `egc` 复制到你的 `$HOME/bin` 或 `/usr/local/bin` 中。
|
||||
|
||||
现在,为你的第一个Emgo程序创建一个新文件夹,随后把示例中链接器脚本复制过来:
|
||||
现在,为你的第一个 Emgo 程序创建一个新文件夹,随后把示例中链接器脚本复制过来:
|
||||
|
||||
```
|
||||
mkdir $HOME/firstemgo
|
||||
cd $HOME/firstemgo
|
||||
cp $EGPATH/src/stm32/examples/f030-demo-board/blinky/script.ld .
|
||||
|
||||
```
|
||||
|
||||
### 最基本程序
|
||||
|
||||
在 _main.go_ 文件中创建一个最基本的程序:
|
||||
在 `main.go` 文件中创建一个最基本的程序:
|
||||
|
||||
```
|
||||
package main
|
||||
|
||||
func main() {
|
||||
}
|
||||
|
||||
```
|
||||
|
||||
文件编译没有出现任何问题:
|
||||
@ -91,12 +82,11 @@ $ egc
|
||||
$ arm-none-eabi-size cortexm0.elf
|
||||
text data bss dec hex filename
|
||||
7452 172 104 7728 1e30 cortexm0.elf
|
||||
|
||||
```
|
||||
|
||||
第一次编译可能会花点时间。编译后产生的二进制占用了7624个字节的Flash空间(文本+数据)。对于一个什么都没做的程序来说,占用的空间有些大。还剩下8760字节,可以用来做些有用的事。
|
||||
第一次编译可能会花点时间。编译后产生的二进制占用了 7624 个字节的 Flash 空间(文本 + 数据)。对于一个什么都没做的程序来说,占用的空间有些大。还剩下 8760 字节,可以用来做些有用的事。
|
||||
|
||||
不妨试试传统的 _Hello, World!_ 程序:
|
||||
不妨试试传统的 “Hello, World!” 程序:
|
||||
|
||||
```
|
||||
package main
|
||||
@ -106,7 +96,6 @@ import "fmt"
|
||||
func main() {
|
||||
fmt.Println("Hello, World!")
|
||||
}
|
||||
|
||||
```
|
||||
|
||||
不幸的是,这次结果有些糟糕:
|
||||
@ -116,17 +105,15 @@ $ egc
|
||||
/usr/local/arm/bin/arm-none-eabi-ld: /home/michal/P/go/src/github.com/ziutek/emgo/egpath/src/stm32/examples/f030-demo-board/blog/cortexm0.elf section `.text' will not fit in region `Flash'
|
||||
/usr/local/arm/bin/arm-none-eabi-ld: region `Flash' overflowed by 10880 bytes
|
||||
exit status 1
|
||||
|
||||
```
|
||||
|
||||
_Hello, World!_ 需要 STM32F030x6 上至少32KB的Flash空间.
|
||||
|
||||
_fmt_ 包强制包含整个 _strconv_ 和 _reflect_ 包。这三个包,即使在精简版本中的Emgo中,占用空间也很大。我们不能使用这个例子了。有很多的应用不需要好看的文本输出。通常,一个或多个LED,或者七段数码管显示就足够了。不过,在第二部分,我会尝试使用 _strconv_ 包来格式化,并在UART 上显示一些数字和文本。
|
||||
“Hello, World!” 需要 STM32F030x6 上至少 32KB 的 Flash 空间。
|
||||
|
||||
`fmt` 包强制包含整个 `strconv` 和 `reflect` 包。这三个包,即使在精简版本中的 Emgo 中,占用空间也很大。我们不能使用这个例子了。有很多的应用不需要好看的文本输出。通常,一个或多个 LED,或者七段数码管显示就足够了。不过,在第二部分,我会尝试使用 `strconv` 包来格式化,并在 UART 上显示一些数字和文本。
|
||||
|
||||
### 闪烁
|
||||
|
||||
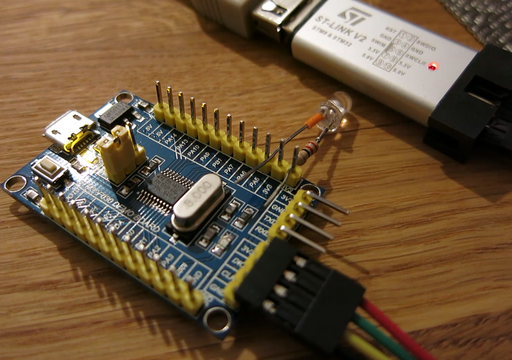
我们的开发板上有一个与PA4引脚和 VCC 相连的LED。这次我们的代码稍稍长了一些:
|
||||
我们的开发板上有一个与 PA4 引脚和 VCC 相连的 LED。这次我们的代码稍稍长了一些:
|
||||
|
||||
```
|
||||
package main
|
||||
@ -160,33 +147,32 @@ func main() {
|
||||
delay.Millisec(900)
|
||||
}
|
||||
}
|
||||
|
||||
```
|
||||
|
||||
按照惯例, _init_ 函数用来初始化和配置外设。
|
||||
按照惯例,`init` 函数用来初始化和配置外设。
|
||||
|
||||
`system.SetupPLL(8, 1, 48/8)` 用来配置RCC,将外部的8 MHz振荡器的PLL作为系统时钟源。PLL 分频器设置为1,倍频数设置为 48/8 =6,这样系统时钟频率为48MHz.
|
||||
`system.SetupPLL(8, 1, 48/8)` 用来配置 RCC,将外部的 8 MHz 振荡器的 PLL 作为系统时钟源。PLL 分频器设置为 1,倍频数设置为 48/8 =6,这样系统时钟频率为 48MHz。
|
||||
|
||||
`systick.Setup(2e6)` 将 Cortex-M SYSTICK 时钟作为系统时钟,每隔 2e6次纳秒运行一次(每秒钟500次)。
|
||||
`systick.Setup(2e6)` 将 Cortex-M SYSTICK 时钟作为系统时钟,每隔 2e6 次纳秒运行一次(每秒钟 500 次)。
|
||||
|
||||
`gpio.A.EnableClock(false)` 开启了 GPIO A 口的时钟。_False_ 意味着这一时钟在低功耗模式下会被禁用,但在STM32F0系列中并未实现这一功能。
|
||||
`gpio.A.EnableClock(false)` 开启了 GPIO A 口的时钟。`False` 意味着这一时钟在低功耗模式下会被禁用,但在 STM32F0 系列中并未实现这一功能。
|
||||
|
||||
`led.Setup(cfg)` 设置 PA4 引脚为开漏输出.
|
||||
`led.Setup(cfg)` 设置 PA4 引脚为开漏输出。
|
||||
|
||||
`led.Clear()` 将 PA4引脚设为低, 在开漏设置中,打开LED.
|
||||
`led.Clear()` 将 PA4 引脚设为低,在开漏设置中,打开 LED。
|
||||
|
||||
`led.Set()` 将 PA4 设为高电平状态 , 关掉LED.
|
||||
`led.Set()` 将 PA4 设为高电平状态,关掉LED。
|
||||
|
||||
编译这个代码:
|
||||
|
||||
```
|
||||
$ egc
|
||||
$ arm-none-eabi-size cortexm0.elf
|
||||
text data bss dec hex filename
|
||||
9772 172 168 10112 2780 cortexm0.elf
|
||||
|
||||
```
|
||||
|
||||
正如你所看到的,闪烁占用了2320 字节,比最基本程序占用空间要大。还有6440字节的剩余空间。
|
||||
正如你所看到的,这个闪烁程序占用了 2320 字节,比最基本程序占用空间要大。还有 6440 字节的剩余空间。
|
||||
|
||||
看看代码是否能运行:
|
||||
|
||||
@ -211,17 +197,15 @@ xPSR: 0x61000000 pc: 0x2000003a msp: 0x20000da0
|
||||
wrote 10240 bytes from file cortexm0.elf in 0.817425s (12.234 KiB/s)
|
||||
** Programming Finished **
|
||||
adapter speed: 950 kHz
|
||||
|
||||
```
|
||||
|
||||
在这篇文章中,这是我第一次,将一个短视频转换成[动画PNG][9]。我对此印象很深,再见了 YouTube. 对于IE用户,我很抱歉,更多信息请看[apngasm][10].我本应该学习 HTML5,但现在,APNG是我最喜欢的,用来播放循环短视频的方法了。
|
||||
在这篇文章中,这是我第一次,将一个短视频转换成[动画 PNG][9]。我对此印象很深,再见了 YouTube。 对于 IE 用户,我很抱歉,更多信息请看 [apngasm][10]。我本应该学习 HTML5,但现在,APNG 是我最喜欢的,用来播放循环短视频的方法了。
|
||||
|
||||

|
||||
|
||||
### 更多的Go语言编程
|
||||
|
||||
如果你不是一个Go 程序员,但你已经听说过一些关于Go 语言的事情,你可能会说:“Go语法很好,但跟C比起来,并没有明显的提升.让我看看 _Go 语言_ 的 _channels_ 和 _goroutines!”
|
||||
### 更多的 Go 语言编程
|
||||
|
||||
如果你不是一个 Go 程序员,但你已经听说过一些关于 Go 语言的事情,你可能会说:“Go 语法很好,但跟 C 比起来,并没有明显的提升。让我看看 Go 语言的通道和协程!”
|
||||
|
||||
接下来我会一一展示:
|
||||
|
||||
@ -265,9 +249,9 @@ func main() {
|
||||
|
||||
```
|
||||
|
||||
代码改动很小: 添加了第二个LED,上一个例子中的 _main_ 函数被重命名为 _blinky_ 并且需要提供两个参数. _Main_ 在新的goroutine 中先调用 _blinky_, 所以两个LED灯在并行使用. 值得一提的是, _gpio.Pin_ 可以同时访问同一GPIO口的不同引脚。
|
||||
代码改动很小: 添加了第二个 LED,上一个例子中的 `main` 函数被重命名为 `blinky` 并且需要提供两个参数。 `main` 在新的协程中先调用 `blinky`,所以两个 LED 灯在并行使用。值得一提的是,`gpio.Pin` 可以同时访问同一 GPIO 口的不同引脚。
|
||||
|
||||
Emgo 还有很多不足。其中之一就是你需要提前规定goroutines(tasks)的最大执行数量.是时候修改 _script.ld_ 了:
|
||||
Emgo 还有很多不足。其中之一就是你需要提前规定 `goroutines(tasks)` 的最大执行数量。是时候修改 `script.ld` 了:
|
||||
|
||||
```
|
||||
ISRStack = 1024;
|
||||
@ -278,27 +262,24 @@ MaxTasks = 2;
|
||||
INCLUDE stm32/f030x4
|
||||
INCLUDE stm32/loadflash
|
||||
INCLUDE noos-cortexm
|
||||
|
||||
```
|
||||
|
||||
栈的大小需要靠猜,现在还不用关心这一点。
|
||||
|
||||
|
||||
```
|
||||
$ egc
|
||||
$ arm-none-eabi-size cortexm0.elf
|
||||
text data bss dec hex filename
|
||||
10020 172 172 10364 287c cortexm0.elf
|
||||
|
||||
```
|
||||
另一个LED 和 goroutine 一共占用了248字节的Flash空间.
|
||||
|
||||
另一个 LED 和协程一共占用了 248 字节的 Flash 空间。
|
||||
|
||||
|
||||
|
||||
### Channels
|
||||
### 通道
|
||||
|
||||
Channels 是Go语言中goroutines之间相互通信的一种[推荐方式][11].Emgo 甚至能允许通过 _中断处理_ 来使用缓冲channel. 下一个例子就展示了这种情况.
|
||||
通道是 Go 语言中协程之间相互通信的一种[推荐方式][11]。Emgo 甚至能允许通过*中断处理*来使用缓冲通道。下一个例子就展示了这种情况。
|
||||
|
||||
```
|
||||
package main
|
||||
@ -379,32 +360,26 @@ func timerISR() {
|
||||
var ISRs = [...]func(){
|
||||
irq.TIM3: timerISR,
|
||||
}
|
||||
|
||||
```
|
||||
|
||||
与之前例子相比较下的不同:
|
||||
|
||||
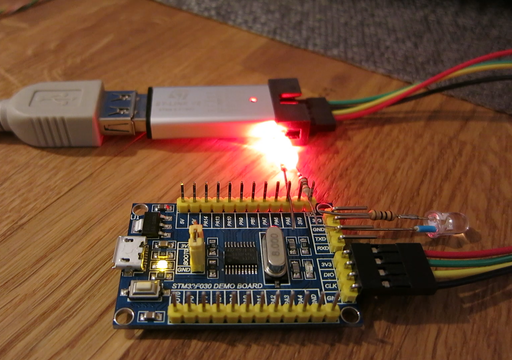
1. 添加了第三个LED,并连接到 PA9 引脚.(UART头的TXD引脚)
|
||||
1. 添加了第三个 LED,并连接到 PA9 引脚(UART 头的 TXD 引脚)。
|
||||
2. 时钟(`TIM3`)作为中断源。
|
||||
3. 新函数 `timerISR` 用来处理 `irq.TIM3` 的中断。
|
||||
4. 新增容量为 1 的缓冲通道是为了 `timerISR` 和 `blinky` 协程之间的通信。
|
||||
5. `ISRs` 数组作为*中断向量表*,是更大的*异常向量表*的一部分。
|
||||
6. `blinky` 中的 `for` 语句被替换成 `range` 语句。
|
||||
|
||||
2. 时钟(TIM3)作为中断源.
|
||||
为了方便起见,所有的 LED,或者说它们的引脚,都被放在 `leds` 这个数组里。另外,所有引脚在被配置为输出之前,都设置为一种已知的初始状态(高电平状态)。
|
||||
|
||||
3. 新函数 _timerISR_ 用来处理 _irq.TIM3_ 的中断.
|
||||
在这个例子里,我们想让时钟以 1 kHz 的频率运行。为了配置 TIM3 预分频器,我们需要知道它的输入时钟频率。通过参考手册我们知道,输入时钟频率在 `APBCLK = AHBCLK` 时,与 `APBCLK` 相同,反之等于 2 倍的 `APBCLK`。
|
||||
|
||||
4. 新增容量为1 的缓冲channel 是为了 _timerISR_ 和 _blinky_ goroutines 之间的通信.
|
||||
如果 CNT 寄存器增加 1 kHz,那么 ARR 寄存器的值等于*更新事件*(重载事件)在毫秒中的计数周期。 为了让更新事件产生中断,必须要设置 DIER 寄存器中的 UIE 位。CEN 位能启动时钟。
|
||||
|
||||
5. _ISRs_ 数组作为 _中断向量表_,是 更大的_异常向量表_ 的一部分.
|
||||
时钟外设在低功耗模式下必须启用,为了自身能在 CPU 处于休眠时保持运行: `timer.EnableClock(true)`。这在 STM32F0 中无关紧要,但对代码可移植性却十分重要。
|
||||
|
||||
6. _blinky中的for语句_ 被替换成 _range语句_ .
|
||||
|
||||
为了方便起见,所有的LED,或者说他们的引脚,都被放在 _leds_ 这个数组里. 另外, 所有引脚在被配置为输出之前,都设置为一种已知的初始状态(高电平状态).
|
||||
|
||||
在这个例子里,我们想让时钟以1 kHz的频率运行。为了配置预分频器,我们需要知道它的输入时钟频率。通过参考手册我们知道,输入时钟频率在APBCLK = AHBCLK时,与APBCLK 相同,反之等于2倍的APBCLK。
|
||||
|
||||
如果CNT寄存器增加 1kHz,那么ARR寄存器的值等于 _更新事件_ (重载事件)在毫秒中的计数周期。 为了让更新事件产生中断,必须要设置DIER 寄存器中的UIE位。CEN位能启动时钟。
|
||||
|
||||
时钟外设在低功耗模式下必须启用,为了自身能在CPU处于休眠时保持运行: `timer.EnableClock(true)`。这在STM32F0中无关紧要,但对代码可移植性却十分重要。
|
||||
|
||||
_timerISR_ 函数处理 _irq.TIM3_ 的中断请求。 `timer.SR.Store(0)` 会清除SR寄存器里的所有事件标志,无效化向[NVIC][12]发出的所有中断请求。凭借经验,由于中断请求无效的延时性,需要在程序一开始马上清除所有的中断标志。这避免了无意间再次调用处理。为了确保万无一失,需要先清除标志,再读取,但是在我们的例子中,清除标志就已经足够了。
|
||||
`timerISR` 函数处理 `irq.TIM3` 的中断请求。`timer.SR.Store(0)` 会清除 SR 寄存器里的所有事件标志,无效化向 [NVIC][12] 发出的所有中断请求。凭借经验,由于中断请求无效的延时性,需要在程序一开始马上清除所有的中断标志。这避免了无意间再次调用处理。为了确保万无一失,需要先清除标志,再读取,但是在我们的例子中,清除标志就已经足够了。
|
||||
|
||||
下面的这几行代码:
|
||||
|
||||
@ -415,14 +390,13 @@ case ch <- 0:
|
||||
default:
|
||||
leds[0].Clear()
|
||||
}
|
||||
|
||||
```
|
||||
|
||||
是Go语言中,如何在channel 上非阻塞地发送消息的方法。 中断处理程序无法一直等待channel 中的空余空间。如果channel已满,则执行default,开发板上的LED就会开启,直到下一次中断。
|
||||
是 Go 语言中,如何在通道上非阻塞地发送消息的方法。中断处理程序无法一直等待通道中的空余空间。如果通道已满,则执行 `default`,开发板上的LED就会开启,直到下一次中断。
|
||||
|
||||
_ISRs_ 数组包含了中断向量表。 `//c:__attribute__((section(".ISRs")))` 会导致链接器将数组插入到 .ISRs section 中。
|
||||
`ISRs` 数组包含了中断向量表。`//c:__attribute__((section(".ISRs")))` 会导致链接器将数组插入到 `.ISRs` 节中。
|
||||
|
||||
_blinky’s for_ 循环的新写法:
|
||||
`blinky` 的 `for` 循环的新写法:
|
||||
|
||||
```
|
||||
for range ch {
|
||||
@ -431,10 +405,9 @@ for range ch {
|
||||
led.Set()
|
||||
delay.Millisec(period - 100)
|
||||
}
|
||||
|
||||
```
|
||||
|
||||
等价于:
|
||||
等价于:
|
||||
|
||||
```
|
||||
for {
|
||||
@ -447,10 +420,9 @@ for {
|
||||
led.Set()
|
||||
delay.Millisec(period - 100)
|
||||
}
|
||||
|
||||
```
|
||||
|
||||
注意,在这个例子中,我们不在意channel中收到的值,我们只对其接受到的消息感兴趣。我们可以在声明时,将channel元素类型中的 _int_ 用空结构体来代替,发送消息时, 用`struct{}{}` 结构体的值代替0,但这部分对新手来说可能会有些陌生。
|
||||
注意,在这个例子中,我们不在意通道中收到的值,我们只对其接受到的消息感兴趣。我们可以在声明时,将通道元素类型中的 `int` 用空结构体 `struct{}` 来代替,发送消息时,用 `struct{}{}` 结构体的值代替 0,但这部分对新手来说可能会有些陌生。
|
||||
|
||||
让我们来编译一下代码:
|
||||
|
||||
@ -459,37 +431,35 @@ $ egc
|
||||
$ arm-none-eabi-size cortexm0.elf
|
||||
text data bss dec hex filename
|
||||
11096 228 188 11512 2cf8 cortexm0.elf
|
||||
|
||||
```
|
||||
|
||||
新的例子占用了11324字节的Flash 空间,比上一个例子多占用了1132字节。
|
||||
新的例子占用了 11324 字节的 Flash 空间,比上一个例子多占用了 1132 字节。
|
||||
|
||||
采用现在的时序,两个 _blinky_ goroutines 从channel 中获取数据的速度,比 _timerISR_ 发送数据的速度要快。所以它们在同时等待新数据,你还能观察到 _select_ 的随机性,这也是[Go 规范][13]所要求的.
|
||||
采用现在的时序,两个闪烁协程从通道中获取数据的速度,比 `timerISR` 发送数据的速度要快。所以它们在同时等待新数据,你还能观察到 `select` 的随机性,这也是 [Go 规范][13]所要求的。
|
||||
|
||||
|
||||
|
||||
开发板上的LED一直没有亮起,说明channel 从未出现过溢出。
|
||||
|
||||
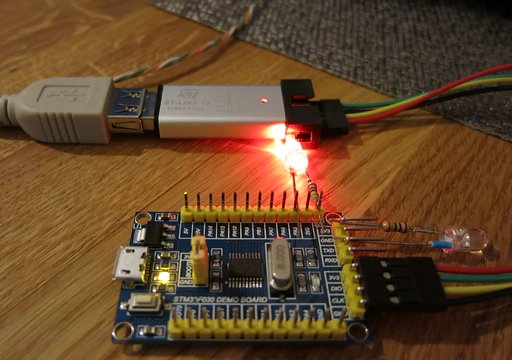
我们可以加快消息发送的速度,将 `timer.ARR.Store(700)` 改为 `timer.ARR.Store(200)`。 现在 _timerISR_ 每秒钟发送5条消息,但是两个接收者加起来,每秒也只能接受4条消息。
|
||||
开发板上的 LED 一直没有亮起,说明通道从未出现过溢出。
|
||||
|
||||
我们可以加快消息发送的速度,将 `timer.ARR.Store(700)` 改为 `timer.ARR.Store(200)`。 现在 `timerISR` 每秒钟发送 5 条消息,但是两个接收者加起来,每秒也只能接受 4 条消息。
|
||||
|
||||
|
||||
|
||||
正如你所看到的, _timerISR_ 开启黄色LED灯,意味着 channel 上已经没有剩余空间了。
|
||||
正如你所看到的,`timerISR` 开启黄色 LED 灯,意味着通道上已经没有剩余空间了。
|
||||
|
||||
第一部分到这里就结束了。你应该知道,这一部分并未展示Go中最重要的部分, _接口_.
|
||||
第一部分到这里就结束了。你应该知道,这一部分并未展示 Go 中最重要的部分,接口。
|
||||
|
||||
Goroutine 和channel 只是一些方便好用的语法。你可以用自己的代码来替换它们,这并不容易,但也可以实现。 接口是Go 语言的基础。这是文章中 [第二部分][14]所要提到的.
|
||||
协程和通道只是一些方便好用的语法。你可以用自己的代码来替换它们,这并不容易,但也可以实现。接口是Go 语言的基础。这是文章中 [第二部分][14]所要提到的.
|
||||
|
||||
在Flash上我们还有些剩余空间.
|
||||
在 Flash 上我们还有些剩余空间。
|
||||
|
||||
--------------------------------------------------------------------------------
|
||||
|
||||
via: https://ziutek.github.io/2018/03/30/go_on_very_small_hardware.html
|
||||
|
||||
作者:[ Michał Derkacz][a]
|
||||
译者:[译者ID](https://github.com/译者ID)
|
||||
校对:[校对者ID](https://github.com/校对者ID)
|
||||
作者:[Michał Derkacz][a]
|
||||
译者:[wenwensnow](https://github.com/wenwensnow)
|
||||
校对:[wxy](https://github.com/wxy)
|
||||
|
||||
本文由 [LCTT](https://github.com/LCTT/TranslateProject) 原创编译,[Linux中国](https://linux.cn/) 荣誉推出
|
||||
|
||||
|
||||
Loading…
Reference in New Issue
Block a user