mirror of
https://github.com/LCTT/TranslateProject.git
synced 2024-12-26 21:30:55 +08:00
PRF:20090127 Anatomy of a Program in Memory.md
@qhwdw 请复核有无问题。
This commit is contained in:
parent
ea33991ab4
commit
1105a52012
@ -1,47 +1,47 @@
|
||||
剖析内存中的程序
|
||||
剖析内存中的程序之秘
|
||||
============================================================
|
||||
|
||||
内存管理是一个操作系统的核心任务;它对程序员和系统管理员来说也是至关重要的。在接下来的几篇文章中,我将从实践出发着眼于内存管理,并深入到它的内部结构。尽管这些概念很普通,示例也大都来自于 32 位 x86 架构的 Linux 和 Windows 上。第一篇文章描述了在内存中程序如何分布。
|
||||
内存管理是操作系统的核心任务;它对程序员和系统管理员来说也是至关重要的。在接下来的几篇文章中,我将从实践出发着眼于内存管理,并深入到它的内部结构。虽然这些概念很通用,但示例大都来自于 32 位 x86 架构的 Linux 和 Windows 上。这第一篇文章描述了在内存中程序如何分布。
|
||||
|
||||
在一个多任务操作系统中的每个进程都运行在它自己的内存“沙箱”中。这个沙箱是一个虚拟地址空间,它在 32 位的模式中它总共有 4GB 的内存地址块。这些虚拟地址是通过内核页表映射到物理地址的,并且这些虚拟地址是由操作系统内核来维护,进而被进程所消费的。每个进程都有它自己的一组页表,但是在它这里仅是一个钩子。一旦虚拟地址被启用,这些虚拟地址将被应用到这台电脑上的 _所有软件_,_包括内核本身_。因此,一部分虚拟地址空间必须保留给内核使用:
|
||||
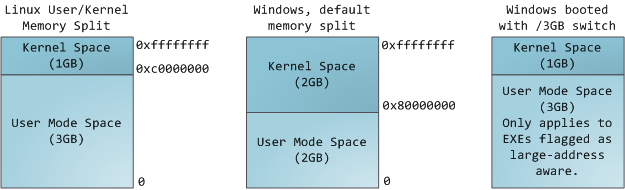
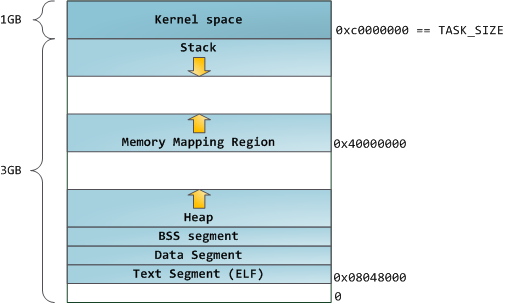
在一个多任务操作系统中的每个进程都运行在它自己的内存“沙箱”中。这个沙箱是一个<ruby>虚拟地址空间<rt>virtual address space</rt></ruby>,在 32 位的模式中它总共有 4GB 的内存地址块。这些虚拟地址是通过内核<ruby>页表<rt>page table</rt></ruby>映射到物理地址的,并且这些虚拟地址是由操作系统内核来维护,进而被进程所消费的。每个进程都有它自己的一组页表,但是这里有点玄机。一旦虚拟地址被启用,这些虚拟地址将被应用到这台电脑上的 _所有软件_,_包括内核本身_。因此,一部分虚拟地址空间必须保留给内核使用:
|
||||
|
||||
|
||||
|
||||
但是,这并不说内核就使用了很多的物理内存,恰恰相反,它只使用了很少一部分用于去做地址映射。内核空间在内核页表中被标记为仅 [特权代码][1] (ring 2 或更低)独占使用,因此,如果一个用户模式的程序尝试去访问它,将触发一个页面故障错误。在 Linux 中,内核空间是始终存在的,并且在所有进程中都映射相同的物理内存。内核代码和数据总是可寻址的,准备随时去处理中断或者系统调用。相比之下,用户模式中的地址空间,在每次进程切换时都会发生变化:
|
||||
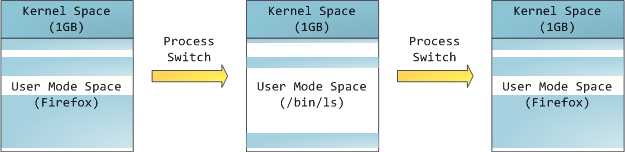
但是,这并**不是**说内核就使用了很多的物理内存,恰恰相反,它只使用了很少一部分可用的地址空间映射到其所需要的物理内存。内核空间在内核页表中被标记为独占使用于 [特权代码][1] (ring 2 或更低),因此,如果一个用户模式的程序尝试去访问它,将触发一个页面故障错误。在 Linux 中,内核空间是始终存在的,并且在所有进程中都映射相同的物理内存。内核代码和数据总是可寻址的,准备随时去处理中断或者系统调用。相比之下,用户模式中的地址空间,在每次进程切换时都会发生变化:
|
||||
|
||||
|
||||
|
||||
蓝色的区域代表映射到物理地址的虚拟地址空间,白色的区域是尚未映射的部分。在上面的示例中,Firefox 因它令人惊奇的“狂吃”内存而使用了大量的虚拟内存空间。在地址空间中不同的组合对应了不同的内存段,像堆、栈、等等。请注意,这些段只是一系列内存地址的简化表示,它与 [Intel 类型的段][2] _并没有任何关系_ 。不过,这是一个在 Linux 中的标准的段布局:
|
||||
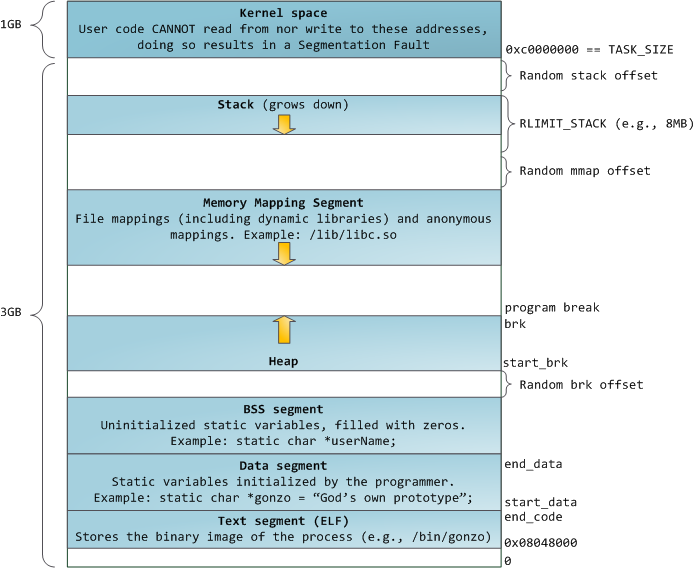
蓝色的区域代表映射到物理地址的虚拟地址空间,白色的区域是尚未映射的部分。在上面的示例中,众所周知的内存“饕餮” Firefox 使用了大量的虚拟内存空间。在地址空间中不同的条带对应了不同的内存段,像<ruby>堆<rt>heap</rt></ruby>、<ruby>栈<rt>stack</rt></ruby>等等。请注意,这些段只是一系列内存地址的简化表示,它与 [Intel 类型的段][2] _并没有任何关系_ 。不过,这是一个在 Linux 进程的标准段布局:
|
||||
|
||||
|
||||
|
||||
当计算是快乐、安全、讨人喜欢的时候,在机器中的几乎每个进程上,它们的起始虚拟地址段都是完全相同的。这将使远程挖掘安全漏洞变得容易。一个漏洞利用经常需要去引用绝对内存位置:在栈中的一个地址,这个地址可能是一个库的函数,等等。远程攻击必须要“盲选”这个地址,因为地址空间都是相同的。当攻击者们这样做的时候,人们就会受到伤害。因此,地址空间随机化开始流行起来。Linux 随机化栈、内存映射段、以及在堆上增加起始地址偏移量。不幸的是,32 位的地址空间是非常拥挤的,为地址空间随机化留下的空间不多,因此 [妨碍了地址空间随机化的效果][6]。
|
||||
当计算机还是快乐、安全的时代时,在机器中的几乎每个进程上,那些段的起始虚拟地址都是**完全相同**的。这将使远程挖掘安全漏洞变得容易。漏洞利用经常需要去引用绝对内存位置:比如在栈中的一个地址,一个库函数的地址,等等。远程攻击闭着眼睛也会选择这个地址,因为地址空间都是相同的。当攻击者们这样做的时候,人们就会受到伤害。因此,地址空间随机化开始流行起来。Linux 会通过在其起始地址上增加偏移量来随机化[栈][3]、[内存映射段][4]、以及[堆][5]。不幸的是,32 位的地址空间是非常拥挤的,为地址空间随机化留下的空间不多,因此 [妨碍了地址空间随机化的效果][6]。
|
||||
|
||||
在进程地址空间中最高的段是栈,在大多数编程语言中它存储本地变量和函数参数。调用一个方法或者函数将推送一个新的栈帧到这个栈。当函数返回时这个栈帧被删除。这个简单的设计,可能是因为数据严格遵循 [后进先出(LIFO)][7] 的次序,这意味着跟踪栈内容时不需要复杂的数据结构 – 一个指向栈顶的简单指针就可以做到。推送和弹出也因此而非常快且准确。也可能是,持续的栈区重用倾向于在 [CPU 缓存][8] 中保持活跃的栈内存,这样可以加快访问速度。进程中的每个线程都有它自己的栈。
|
||||
在进程地址空间中最高的段是栈,在大多数编程语言中它存储本地变量和函数参数。调用一个方法或者函数将推送一个新的<ruby>栈帧<rt>stack frame</rt></ruby>到这个栈。当函数返回时这个栈帧被删除。这个简单的设计,可能是因为数据严格遵循 [后进先出(LIFO)][7] 的次序,这意味着跟踪栈内容时不需要复杂的数据结构 —— 一个指向栈顶的简单指针就可以做到。推入和弹出也因此而非常快且准确。也可能是,持续的栈区重用往往会在 [CPU 缓存][8] 中保持活跃的栈内存,这样可以加快访问速度。进程中的每个线程都有它自己的栈。
|
||||
|
||||
向栈中推送更多的而不是刚合适的数据可能会耗尽栈的映射区域。这将触发一个页面故障,在 Linux 中它是通过 [expand_stack()][9] 来处理的,它会去调用 [acct_stack_growth()][10] 来检查栈的增长是否正常。如果栈的大小低于 <tt>RLIMIT_STACK</tt> 的值(一般是 8MB 大小),那么这是一个正常的栈增长和程序的合理使用,否则可能是发生了未知问题。这是一个栈大小按需调节的常见机制。但是,栈的大小达到了上述限制,将会发生一个栈溢出,并且,程序将会收到一个段故障错误。当映射的栈为满足需要而扩展后,在栈缩小时,映射区域并不会收缩。就像美国联邦政府的预算一样,它只会扩张。
|
||||
向栈中推送更多的而不是刚合适的数据可能会耗尽栈的映射区域。这将触发一个页面故障,在 Linux 中它是通过 [`expand_stack()`][9] 来处理的,它会去调用 [`acct_stack_growth()`][10] 来检查栈的增长是否正常。如果栈的大小低于 `RLIMIT_STACK` 的值(一般是 8MB 大小),那么这是一个正常的栈增长和程序的合理使用,否则可能是发生了未知问题。这是一个栈大小按需调节的常见机制。但是,栈的大小达到了上述限制,将会发生一个栈溢出,并且,程序将会收到一个<ruby>段故障<rt>Segmentation Fault</rt></ruby>错误。当映射的栈区为满足需要而扩展后,在栈缩小时,映射区域并不会收缩。就像美国联邦政府的预算一样,它只会扩张。
|
||||
|
||||
动态栈增长是 [唯一例外的情况][11] ,当它去访问一个未映射的内存区域,如上图中白色部分,是允许的。除此之外的任何其它访问未映射的内存区域将在段故障中触发一个页面故障。一些映射区域是只读的,因此,尝试去写入到这些区域也将触发一个段故障。
|
||||
动态栈增长是 [唯一例外的情况][11] ,当它去访问一个未映射的内存区域,如上图中白色部分,是允许的。除此之外的任何其它访问未映射的内存区域将触发一个页面故障,导致段故障。一些映射区域是只读的,因此,尝试去写入到这些区域也将触发一个段故障。
|
||||
|
||||
在栈的下面,有内存映射段。在这里,内核将文件内容直接映射到内存。任何应用程序都可以通过 Linux 的 [mmap()][12] 系统调用( [实现][13])或者 Windows 的 [CreateFileMapping()][14] / [MapViewOfFile()][15] 来请求一个映射。内存映射是实现文件 I/O 的方便高效的方式。因此,它经常被用于加载动态库。有时候,也被用于去创建一个并不匹配任何文件的匿名内存映射,这种映射经常被用做程序数据的替代。在 Linux 中,如果你通过 [malloc()][16] 去请求一个大的内存块,C 库将会创建这样一个匿名映射而不是使用堆内存。这里的‘大’ 表示是超过了<tt>MMAP_THRESHOLD</tt> 设置的字节数,它的缺省值是 128 kB,可以通过 [mallopt()][17] 去调整这个设置值。
|
||||
在栈的下面,有内存映射段。在这里,内核将文件内容直接映射到内存。任何应用程序都可以通过 Linux 的 [`mmap()`][12] 系统调用( [代码实现][13])或者 Windows 的 [`CreateFileMapping()`][14] / [`MapViewOfFile()`][15] 来请求一个映射。内存映射是实现文件 I/O 的方便高效的方式。因此,它经常被用于加载动态库。有时候,也被用于去创建一个并不匹配任何文件的匿名内存映射,这种映射经常被用做程序数据的替代。在 Linux 中,如果你通过 [`malloc()`][16] 去请求一个大的内存块,C 库将会创建这样一个匿名映射而不是使用堆内存。这里所谓的“大”表示是超过了`MMAP_THRESHOLD` 设置的字节数,它的缺省值是 128 kB,可以通过 [`mallopt()`][17] 去调整这个设置值。
|
||||
|
||||
接下来讲的是“堆”,就在我们接下来的地址空间中,堆提供运行时内存分配,像栈一样,但又不同于栈的是,它分配的数据生存期要长于分配它的函数。大多数编程语言都为程序去提供堆管理支持。因此,满足内存需要是编程语言运行时和内核共同来做的事情。在 C 中,堆分配的接口是 [malloc()][18] ,它是个用户友好的接口,然而在编程语言的垃圾回收中,像 C# 中,这个接口使用 <tt>new</tt> 关键字。
|
||||
接下来讲的是“堆”,就在我们接下来的地址空间中,堆提供运行时内存分配,像栈一样,但又不同于栈的是,它分配的数据生存期要长于分配它的函数。大多数编程语言都为程序提供了堆管理支持。因此,满足内存需要是编程语言运行时和内核共同来做的事情。在 C 中,堆分配的接口是 [`malloc()`][18] 一族,然而在垃圾回收式编程语言中,像 C#,这个接口使用 `new` 关键字。
|
||||
|
||||
如果在堆中有足够的空间去满足内存请求,它可以由编程语言运行时来处理内存分配请求,而无需内核参与。否则将通过 [brk()][19] 系统调用([实现][20])来扩大堆以满足内存请求所需的大小。堆的管理是比较 [复杂的][21],在面对我们程序的混乱分配模式时,它通过复杂的算法,努力在速度和内存使用效率之间取得一种平衡。服务一个堆请求所需要的时间可能是非常可观的。实时系统有一个 [特定用途的分配器][22] 去处理这个问题。堆也会出现 _碎片化_ ,如下图所示:
|
||||
如果在堆中有足够的空间可以满足内存请求,它可以由编程语言运行时来处理内存分配请求,而无需内核参与。否则将通过 [`brk()`][19] 系统调用([代码实现][20])来扩大堆以满足内存请求所需的大小。堆管理是比较 [复杂的][21],在面对我们程序的混乱分配模式时,它通过复杂的算法,努力在速度和内存使用效率之间取得一种平衡。服务一个堆请求所需要的时间可能是非常可观的。实时系统有一个 [特定用途的分配器][22] 去处理这个问题。堆也会出现 _碎片化_ ,如下图所示:
|
||||
|
||||

|
||||
|
||||
最后,我们取得了内存的低位段:BSS、数据、以及程序文本。在 C 中,静态(全局)变量的内容都保存在 BSS 和数据中。它们之间的不同之处在于,BSS 保存 _未初始化的_ 静态变量的内容,它的值在源代码中并没有被程序员设置。BSS 内存区域是_匿名_的:它没有映射到任何文件上。如果你在程序中写这样的语句 <tt>static int cntActiveUsers</tt>,<tt>cntActiveUsers</tt> 的内容就保存在 BSS 中。
|
||||
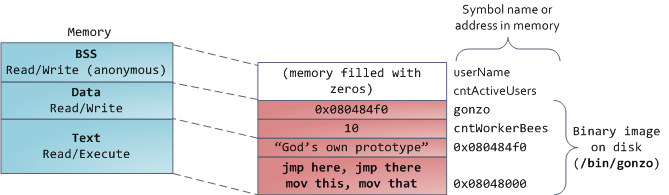
最后,我们抵达了内存的低位段:BSS、数据、以及程序文本。在 C 中,静态(全局)变量的内容都保存在 BSS 和数据中。它们之间的不同之处在于,BSS 保存 _未初始化的_ 静态变量的内容,它的值在源代码中并没有被程序员设置。BSS 内存区域是 _匿名_ 的:它没有映射到任何文件上。如果你在程序中写这样的语句 `static int cntActiveUsers`,`cntActiveUsers` 的内容就保存在 BSS 中。
|
||||
|
||||
反过来,数据段,用于保存在源代码中静态变量_初始化后_的内容。这个内存区域是_非匿名_的。它映射到程序的二进值镜像上的一部分,这个二进制镜像包含在源代码中给定初始化值的静态变量内容。因此,如果你在程序中写这样的语句 <tt>static int cntWorkerBees = 10</tt>,那么,cntWorkerBees 的内容就保存在数据段中,并且初始值为 10。尽管可以通过数据段映射到一个文件,但是这是一个私有内存映射,意味着,如果在内存中这个文件发生了变化,它并不会将这种变化反映到底层的文件上。必须是这样的,否则,分配的全局变量将会改变你磁盘上的二进制文件镜像,这种做法就太不可思议了!
|
||||
反过来,数据段,用于保存在源代码中静态变量 _初始化后_ 的内容。这个内存区域是 _非匿名_ 的。它映射了程序的二进值镜像上的一部分,包含了在源代码中给定初始化值的静态变量内容。因此,如果你在程序中写这样的语句 `static int cntWorkerBees = 10`,那么,`cntWorkerBees` 的内容就保存在数据段中,并且初始值为 `10`。尽管可以通过数据段映射到一个文件,但是这是一个私有内存映射,意味着,如果改变内存,它并不会将这种变化反映到底层的文件上。必须是这样的,否则,分配的全局变量将会改变你磁盘上的二进制文件镜像,这种做法就太不可思议了!
|
||||
|
||||
用图去展示一个数据段是很困难的,因为它使用一个指针。在那种情况下,指针 <tt>gonzo</tt> 的_内容_ – 保存在数据段上的一个 4 字节的内存地址。它并没有指向一个真实的字符串。而这个字符串存在于文本段中,文本段是只读的,它用于保存你的代码中的类似于字符串常量这样的内容。文本段也映射你的内存中的库,但是,如果你的程序写入到这个区域,将会触发一个段故障错误。尽管在 C 中,它比不上从一开始就避免这种指针错误那么有效,但是,这种机制也有助于避免指针错误。这里有一个展示这些段和示例变量的图:
|
||||
用图去展示一个数据段是很困难的,因为它使用一个指针。在那种情况下,指针 `gonzo` 的_内容_(一个 4 字节的内存地址)保存在数据段上。然而,它并没有指向一个真实的字符串。而这个字符串存在于文本段中,文本段是只读的,它用于保存你的代码中的类似于字符串常量这样的内容。文本段也会在内存中映射你的二进制文件,但是,如果你的程序写入到这个区域,将会触发一个段故障错误。尽管在 C 中,它比不上从一开始就避免这种指针错误那么有效,但是,这种机制也有助于避免指针错误。这里有一个展示这些段和示例变量的图:
|
||||
|
||||
|
||||
|
||||
你可以通过读取 <tt>/proc/pid_of_process/maps</tt> 文件来检查 Linux 进程中的内存区域。请记住,一个段可以包含很多的区域。例如,每个内存映射的文件一般都在 mmap 段中的它自己的区域中,而动态库有类似于BSS 和数据一样的额外的区域。下一篇文章中我们将详细说明“区域(area)”的真正含义是什么。此外,有时候人们所说的“数据段(data segment)”是指“数据 + BSS + 堆”。
|
||||
你可以通过读取 `/proc/pid_of_process/maps` 文件来检查 Linux 进程中的内存区域。请记住,一个段可以包含很多的区域。例如,每个内存映射的文件一般都在 mmap 段中的它自己的区域中,而动态库有类似于 BSS 和数据一样的额外的区域。下一篇文章中我们将详细说明“<ruby>区域<rt>area</rt></ruby>”的真正含义是什么。此外,有时候人们所说的“<ruby>数据段<rt>data segment</rt></ruby>”是指“<ruby>数据<rt>data</rt></ruby> + BSS + 堆”。
|
||||
|
||||
你可以使用 [nm][23] 和 [objdump][24] 命令去检查二进制镜像,去显示它们的符号、地址、段、等等。最终,在 Linux 中上面描述的虚拟地址布局是一个“弹性的”布局,这就是这几年来的缺省情况。它假设 <tt>RLIMIT_STACK</tt> 有一个值。如果没有值的话,Linux 将恢复到如下所示的“经典” 布局:
|
||||
你可以使用 [nm][23] 和 [objdump][24] 命令去检查二进制镜像,去显示它们的符号、地址、段等等。最终,在 Linux 中上面描述的虚拟地址布局是一个“弹性的”布局,这就是这几年来的缺省情况。它假设 `RLIMIT_STACK` 有一个值。如果没有值的话,Linux 将恢复到如下所示的“经典” 布局:
|
||||
|
||||
|
||||
|
||||
@ -51,9 +51,9 @@
|
||||
|
||||
via: http://duartes.org/gustavo/blog/post/anatomy-of-a-program-in-memory/
|
||||
|
||||
作者:[gustavo ][a]
|
||||
作者:[gustavo][a]
|
||||
译者:[qhwdw](https://github.com/qhwdw)
|
||||
校对:[校对者ID](https://github.com/校对者ID)
|
||||
校对:[wxy](https://github.com/wxy)
|
||||
|
||||
本文由 [LCTT](https://github.com/LCTT/TranslateProject) 原创编译,[Linux中国](https://linux.cn/) 荣誉推出
|
||||
|
||||
|
||||
Loading…
Reference in New Issue
Block a user